
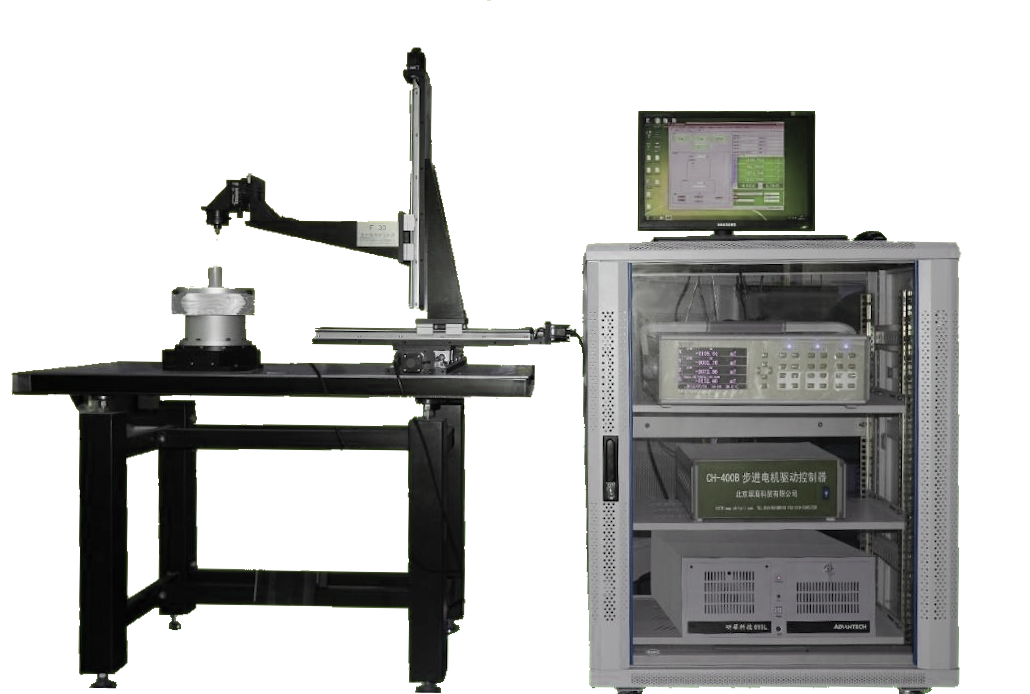
Система измерения магнитных свойств Magmapper-12

ЭМТИОН
Измеряемый объем - 200 x 200 x 200 мм
Описание Система измерения магнитных свойств Magmapper-12
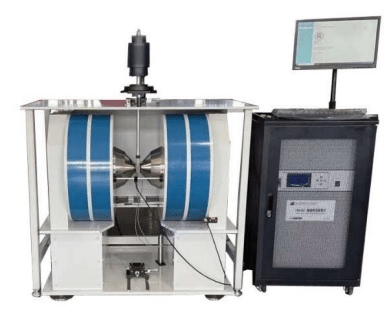
Система Magmapper-12 измеряет трехмерное распределение магнитных структур на поверхностях различных объектов, оценивает равномерность распределения поля. Система может использоваться для тестирования характеристик многополюсных магнитных колец, определения распределения магнитных полюсов N/S, а также измерения магнитных полей двигателей, сверхпроводящих магнитов, магнитов МРТ и других магнитных полей. Программное обеспечение поддерживает анализ параметров многополюсных колец (магнитные пики, положение, ширина полюса, площадь). Результаты измерений автоматически преобразуются в графики (1D, 2D, 3D), сохраняются в базе данных и доступны для печати. Система может применяться в аэрокосмической, оборонной и научно-исследовательской областях.
Особенности измерителя магнитного поля Magmapper-12
- Широкий диапазон измерений: Измеряемый объем – 200x200x200 мм (X,Y,Z) (возможно больше в зависимости конфигурации системы). Свободное перемещение по трем осям. При интеграции с поворотной платформой система становится 5-осевой. Точность позиционирования: разрешение 0.39 мкм, точность 10 мкм, повторяемость <5 мкм. Точность вращения: угловое разрешение <0.0002°, точность 0.01°, повторяемость <0.005°. Скорость движения регулируется в 64 ступени. Используемые приводы: шаговые/сервоприводы, линейные двигатели с оптическими линейками. Детальное распределение точек измерения в пространстве.
- Высокая точность измерений: Используется высокоточный цифровой гауссметр (1D или 3D) с микрозондами Холла (ɸ0.5мм для 1D, ɸ1.2мм для 2D/3D). Точность 1D: ±0.05% от показания ±0.005. Точность 3D: ±0.10% от показания ±0.005.
- Автоматизация и цифровизация: Управление и сбор данных в реальном времени осуществляются компьютером. Программное обеспечение позволяет проектировать схемы измерений. Ввод пользователем параметров объекта запускает полностью автоматический процесс измерения с записью и сохранением данных. Система генерирует графики и протоколы измерений. Поддерживается работа с векторными анализаторами цепей (VNA) для частотных измерений
- Гибкая конфигурация: Линейная 3D платформа и поворотная платформа конфигурируются для выполнения различных методик измерений. Функционал ПО может быть расширен по требованию Заказчика для обеспечения полностью автоматического измерения без оператора.
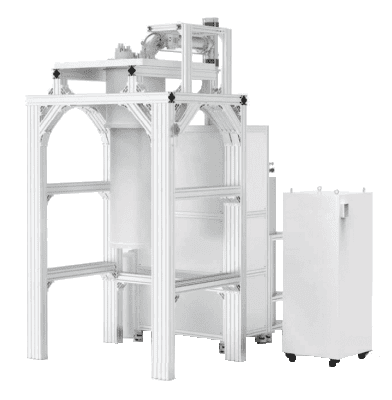
Конфигурация маппера Magmapper-12 включает: Персональный компьютер с управляющим ПО, высокоточный гауссметр (1D или 3D), измерительный зонд, электронный блок управления многокоординатным перемещением и контроллер позиционирующей платформы. Система состоит из блока сбора данных (гауссметр, зонд) и блока перемещения (электронный блок, контроллер, позиционирующий стол). Программное обеспечение ПК отправляет команды контроллеру, который управляет приводами осей стола. Параметры стола (размер, длина хода осей, количество осей) настраиваются пользователем для сканирования по различным траекториям и углам.
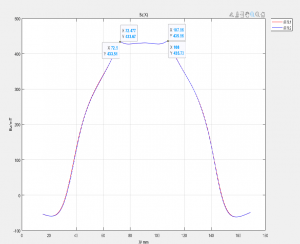
Ручное управление
Позиционирующий стол перемещает зонд в заданные координаты. После стабилизации значение поля считывается через ПО. Режим для точечных измерений. Разрешение позиционирования до микрометров.
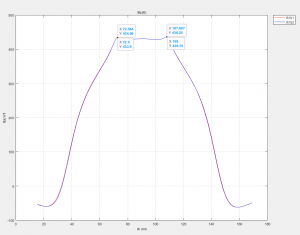
Управление по траектории (Flow control)
Стол перемещает зонд по заданной траектории с указанным шагом и количеством шагов, измеряя поле в каждой точке. Режим для измерения распределения поля вдоль линии в плоскости с построением графика.
Режим сканирования
Задается размер области сканирования и интервал между точками. Сканирование выполняется по S-образной траектории. Поддерживаются режимы: точечное сканирование, непрерывное сканирование (быстрее, больше точек данных) и импульсное сканирование. Возможно сканирование горизонтальных и вертикальных плоскостей.
 |
|
Результат линейного сканирования по траектории |
 |
|
Результат ручного точечного сканирования |
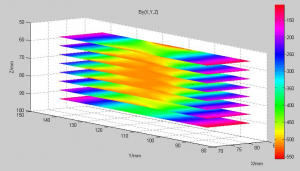
Трехмерная визуализация пространственного магнитного поля
Добавление перемещения по третьей оси (Z) к плоскостному 2D-сканированию позволяет последовательно сканировать серию параллельных плоскостей (с заданным шагом, например, 1 мм). На основе полученных данных система строится объемная (3D) картина распределения магнитного поля.
 |
|
Результат трехмерной визуализации пространственного магнитного поля |
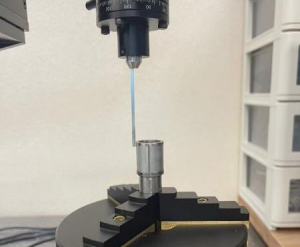
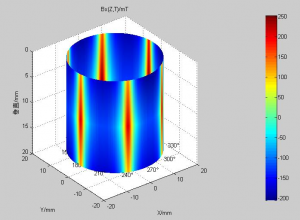
Магнитное поле цилиндрической поверхности
Зонд устанавливается на безопасной высоте. Стол перемещает зонд по заданной траектории (шаг, количество шагов), выполняя измерения напряженности поля на цилиндрической поверхности по периметру.
 |
 |
|
Образец и визуализация его магнитного поля |
|
| Рабочая зона (XYZ) | 200×200×200 мм (базовый размер) |
| Разрешение позиционирования | 0.39 мкм (шаговые двигатели) 10 мкм (сервоприводы/линейные двигатели) |
| Точность позиционирования | ±0.01 мм (линейные оси) ±0.01° (вращательные оси) |
| Повторяемость позиционирования | <0.005 мм (линейные оси) <0.005° (вращательные оси) |
| Разрешение измерения поля | 0.0001 мТ (0.1 μТ) |
| Точность измерения поля (1D) | ±(0.05% показания + 0.005 мТ) |
| Точность измерения поля (3D) | ±(0.15% показания + 0.005 мТ) |
| Диапазон измерения поля | 0.1 μТ – 30 Тл |
| Размер активной зоны зонда | 0.08×0.08 мм (минимальный) 0.15×0.15 мм (стандартный) |
| Скорость сканирования | 0.01-200 мм/с (регулируемая, 64 ступени) |
| Поддерживаемые траектории | Точки, линии (прямые/дуги), поверхности (прямоугольные/цилиндрические), объемы |
| Темп. диапазон работы зондов | -269°C до +200°C |
Каталог ЭМТИОН
ЗагрузитьМожет быть полезно:
Безгелиевый криостат растворения DR
Безгелиевый криостат с рефрижератором растворения серии DR – это […]
Запрос цены ПодробнееВибромагнитометр VSM-100
Вибрационный магнитометр представляет собой высокочувствительный инструмент для определения […]
Запрос цены ПодробнееCистема Керр-микроскопии серии YP-1407

Керр микроскоп серии YP-1407 – это система для локального […]
Запрос цены Подробнее